
This article has been machine-translated from Chinese. The translation may contain inaccuracies or awkward phrasing. If in doubt, please refer to the original Chinese version.
I. Graphs
1. What is a Graph
Represents "many-to-many" relationships and contains:
- A set of vertices: usually denoted V (Vertex) for the vertex set
- A set of edges: usually denoted E (Edge) for the edge set
- An undirected edge is a vertex pair: (v, w) belongs to E, where v, w belong to V
- A directed edge <v, w> represents an edge from v to w (one-way)
- Self-loops and multiple edges are not considered
Abstract Data Type Definition
Type name: Graph Data object set: G(V, E) consists of a non-empty finite vertex set V and a finite edge set E. Operation set: For any graph G belonging to Graph, and v belonging to V, e belonging to E:
- Graph Create(): Create and return an empty graph;
- Graph InsertVertex(Graph G, Vertex v): Insert vertex v into graph G
- Graph InsertEdge(Graph G, Edge e): Insert edge e into graph G
- void DFS(Graph G, Vertex v): Depth-first traversal of graph G starting from vertex v;
- void BFS(Graph G, Vertex v): Breadth-first traversal of graph G starting from vertex v;
- void ShortestPath(Graph G, Vertex v, int Dist[]): Compute the shortest distances from vertex v to all other vertices in graph G;
- void MST(Graph G): Compute the minimum spanning tree of graph G Common terminology: Undirected graph, directed graph, network, etc.
How to Represent a Graph in a Program
Adjacency Matrix


- Intuitive, simple, and easy to understand
- Convenient for checking whether an edge exists between any pair of vertices
- Convenient for finding all "adjacent vertices" (vertices directly connected by an edge) of any vertex
- Convenient for computing the "degree" of any vertex (the number of edges originating from a vertex is its "out-degree", and the number of edges pointing to a vertex is its "in-degree")
- Undirected graph: The number of non-zero elements in the corresponding row (or column)
- Directed graph: The number of non-zero elements in the row is the out-degree, and the number of non-zero elements in the column is the in-degree
Adjacency List
Pointer array + linked lists. Very efficient when vertices are sparse.

- Convenient for finding all "adjacent vertices" (vertices directly connected by an edge) of any vertex
- Saves space for sparse graphs
- Requires N head pointers + 2E nodes (each node has at least 2 fields)
- Convenient for computing the "degree" of any vertex in an undirected graph, but for directed graphs, only the out-degree can be computed.
2. Graph Traversal
DFS (Depth-First Search)
Depth-First Search (DFS) explores each possible branch path as deep as possible, and each node can only be visited once. Pseudocode:
void DFS(Vertex V) {
visited[V] = true;
for(each adjacent vertex W of V)
if (!visited[W])
DFS(W);
}BFS (Breadth-First Search)
Breadth-First Search (BFS) is implemented using a queue (FIFO). Pseudocode:
void BFS(Vertex V) {
visited[V] = true;
Enqueue(V, Q);//Enqueue the vertex
while(!IsEmpty(Q)) {//Search ends when the queue is empty
V = Dequeue(Q);//V is the front element of the queue
for(each adjacent vertex W of V) {
if ( !visited[W] ) {
visited[W] = true;//Mark the vertex as visited
Enqueue(W, Q);//Enqueue the vertex
}
}
}
}What if the Graph is Disconnected?
- Path: The path from V to W is a set of vertices {V, V1, V2, ..., Vn, W} where any pair of adjacent vertices has an edge in the graph. The path length is the number of edges in the path (if weighted, it is the sum of all edge weights). If all vertices from V to W are distinct, it is called a simple path.
- Connected: If there exists an (undirected) path from V to W, then V and W are connected.
- Cycle: A path where the starting point equals the ending point.
- Connected Graph: Any two vertices in the graph are connected.
- Connected Component: A maximal connected subgraph of an undirected graph.
- Maximum vertices: Adding one more vertex would make it disconnected
- Maximum edges: Includes all edges connecting the vertices within the subgraph

- Strongly Connected: In a directed graph, if there exist bidirectional paths between vertices V and W, then V and W are strongly connected.
- Strongly Connected Graph: Any two vertices in a directed graph are strongly connected.
- Strongly Connected Component: A maximal strongly connected subgraph of a directed graph.
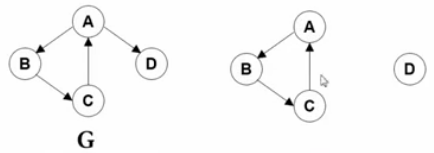
Each call to DFS actually traverses the entire connected component containing V. The same applies to BFS.
void ListComponents ( Graph G ) {//Traverse connected components
for (each V in G)
if ( !visited[V] ) {
DFS( V );
}
}3. How to Build a Graph
(1) Building a Graph Represented by an Adjacency Matrix
Definition
const int MaxVertexNum = 100;
typedef int DataType;
typedef bool WeightType;
typedef struct GNode *PtrToGNode;
struct GNode {
int Nv;//Number of vertices
int Ne;//Number of edges
WeightType G[MaxVertexNum][MaxVertexNum];
DataType Data[MaxVertexNum];//Store vertex data
};
typedef PtrToGNode MGraph;//Graph type stored as adjacency matrixInitialization
Initialize a graph with VertexNum vertices but no edges.
typedef int Vertex;
MGraph CreateGraph(int VertexNum) {
Vertex V, W;
MGraph Graph;
Graph = (MGraph) malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
//Vertex numbering starts from 0 to Graph->Nv-1
for (V = 0; V < Graph->Nv; V++) {
for(W = 0; W < Graph->Nv; W++) {
Graph->G[V][W] = 0; //For directed graphs, 0 can be changed to INF, etc.
}
}
return Graph;
}Inserting Edges into the Graph
Edge definition
typedef struct ENode *PtrToENode;
struct ENode {
Vertex V1, V2;//Directed edge <V1,V2>
WeightType Weight;//Weight
};
typedef PtrToENode Edge;Insert operation
void InsertEdge(MGraph Graph, Edge E) {
//Insert edge <V1,V2>
Graph->G[E->V1][E->V2] = E->Weight;
//For undirected graphs, also insert edge <V2,V1>
Graph->G[E->V2][E->V1] = E->Weight;
}Complete Construction of an MGraph
Input format
Nv Ne V1 V2 Weight ...
MGraph BuildGraph() {
MGraph Graph;
Edge E;
Vertex V;
int Nv;
cin >> Nv;
Graph = CreateGraph(Nv);//Create a graph with Nv vertices
cin >> Graph->Ne;//Number of edges Ne
if(Graph->Ne != 0) {
E = (Edge)malloc(sizeof(struct ENode));
for (int i = 0; i < Graph->Ne; i++) {
cin >> E->V1 >> E->V2 >> E->Weight;
InsertEdge(Graph, E);
}
}
//If vertices have data, read the data
for(V = 0; V < Graph->Nv; V++) {
cin >> Graph->Data[V];
}
return Graph;
}(2) Building a Graph Represented by an Adjacency List
Can be modified based on the adjacency matrix approach.
Definition
const int MaxVertexNum = 100;
typedef int DataType;
typedef int Vertex;
typedef bool WeightType;
//Adjacency list definition
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode {
Vertex AdjV;//Adjacent vertex index
WeightType Weight;//Edge weight
PtrToAdjVNode Next;
};
typedef struct VNode {
PtrToAdjVNode FirstEdge;
DataType Data;//Store vertex data
}AdjList;
typedef struct GNode *PtrToGNode;
struct GNode {
int Nv;//Number of vertices
int Ne;//Number of edges
AdjList G;//Adjacency list
};
typedef PtrToGNode LGraph;//Graph type stored as adjacency listLGraph Initialization
LGraph CreateGraph(int VertexNum) {
Vertex V, W;
LGraph Graph;
Graph = (LGraph) malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
//Vertex numbering starts from 0 to Graph->Nv-1
for (V = 0; V < Graph->Nv; V++) {
Graph->G[V].FirstEdge = NULL;
return Graph;
}Inserting Edges into an LGraph
typedef struct ENode *PtrToENode;
struct ENode {
Vertex V1, V2;//Directed edge <V1,V2>
WeightType Weight;//Weight
};
typedef PtrToENode Edge;
void InsertEdge(LGraph Graph, Edge E){
PtrToAdjVNode NewNode;
//Insert edge <V1,V2>
//Create a new adjacent node for V2
NewNode = (PtrToAdjVNode) malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V2;
NewNode->Weight = E->Weight;
//Insert V2 adjacent node at the head of V1's list
NewNode->Next = Graph->G[E->V1].FirstEdge;
Graph->G[E->V1].FirstEdge = NewNode;
//For undirected graphs, also insert edge <V2,V1>
//Create a new adjacent node for V1
NewNode = (PtrToAdjVNode) malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V1;
NewNode->Weight = E->Weight;
//Insert V1 adjacent node at the head of V2's list
NewNode->Next = Graph->G[E->V2].FirstEdge;
Graph->G[E->V1].FirstEdge = NewNode;
}Complete Construction of an LGraph
Only need to replace MGraph with LGraph and make minor modifications when storing Data.
LGraph BuildGraph() {
LGraph Graph;
Edge E;
Vertex V;
int Nv;
cin >> Nv;
Graph = CreateGraph(Nv);//Create a graph with Nv vertices
cin >> Graph->Ne;//Number of edges Ne
if(Graph->Ne != 0) {
E = (Edge)malloc(sizeof(struct ENode));
for (int i = 0; i < Graph->Ne; i++) {
cin >> E->V1 >> E->V2 >> E->Weight;
InsertEdge(Graph, E);
}
}
//If vertices have data, read the data
for(V = 0; V < Graph->Nv; V++) {
cin >> Graph->G[V].Data;
}
return Graph;
}II. Shortest Path Problem
1. Concept Introduction
- In a network, find the path with the minimum sum of edge weights among all paths between two different vertices
- This path is the Shortest Path between the two vertices
- The first vertex is called the Source
- The last vertex is called the Destination
2. Problem Classification
- Single-source shortest path problem: Starting from a fixed source, find the shortest paths to all other vertices
- (Directed) unweighted graph
- (Directed) weighted graph
- Multi-source shortest path problem: Find the shortest paths between any two vertices
2. Single-Source Shortest Path Algorithm for Unweighted Graphs
Find the shortest paths to each vertex in increasing order, very similar to the BFS approach!
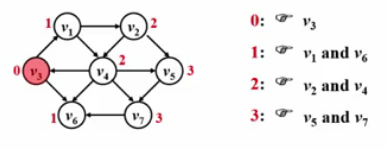
void Unweighted(Vertex S) {
Enqueue(S, Q);
while(!IsEmpty(Q)) {
V = Dequeue(Q);
for (each adjacent vertex W of V)
if(dist[W] == -1) {
dist[W] = dist[V]+1;
path[W] = V;
Enqueue(W, Q);
}
}
}3. Single-Source Shortest Path Algorithm for Weighted Graphs
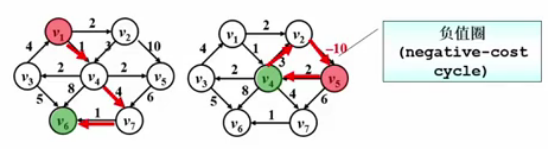
Dijkstra's Algorithm
- Let S = {source s + vertices vi whose shortest paths have been determined}
- For any unvisited vertex v, define dist[v] as the shortest path length from s to v, but this path only passes through vertices in S, i.e., the minimum length of path {s -> (vi belonging to S) -> v}
- If paths are generated in increasing order, then:
- The true shortest path must only pass through vertices in S (provable by contradiction)
- Each time, select the unvisited vertex with the smallest dist for inclusion (greedy approach)
- Adding a vertex v to S may affect the dist value of another vertex w! (So we must check all adjacent vertices w of v!)
- dist[w] = min{ dist[w], dist[v] + weight of <v,w> } dist initialization: All adjacent vertices W of S can be initialized with the weight between s and w; others are defined as positive infinity.
Pseudocode:
void Dijkstra(Vertex s) {
while (1){
V = the unvisited vertex with the smallest dist;
if (no such V exists)
break;
collected[V] = true;
for (each adjacent vertex W of V)
if(collected[W] == false)
if(dist[V] + E<v,w> < dist[W]) {
dist[W] = dist[V]+E<v,w>;
path[W] = V;
}
}
}//Cannot handle negative edgesIn the pseudocode, dist[W] = dist[V] + E<V,W> is not simply an assignment but means that if a shorter distance is found, it should be updated to the shorter distance.

Dijkstra Core Code
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
using namespace std;
const int maxn = 1005;
const int inf = 0x3f3f3f;
int T,N,x,y,z;
int edge[maxn][maxn];
int dist[maxn];
bool vis[maxn];
void init() {
for(int i = 1; i <= N; ++i) {
for(int j = 1; j <= N; ++j) {
edge[i][j] = inf;
}
edge[i][i] = 0;
}
}
void Dijstra(int u) {
for(int i = 1; i <= N; ++i) {
vis[i] = false;
dist[i] = edge[u][i];
}
vis[u] = true;
for(int i = 1; i <= N; ++i) {
int t, mindis = inf;
for(int j = 1; j <= N; ++j) {
if(!vis[j] && dist[j] < mindis) {
mindis = dist[j];
t = j;
}
}
vis[t] = true;
for(int j = 1; j <= N; ++j)
if(!vis[j] && dist[j] > edge[t][j] + dist[t])
dist[j] = edge[t][j] + dist[t];
}
}III. Minimum Spanning Tree
1. What is a Minimum Spanning Tree (MST)
- It is a tree
- No cycles
- |V| vertices must have exactly |V|-1 edges
- It is a spanning tree
- Contains all vertices
- All |V|-1 edges are from the graph
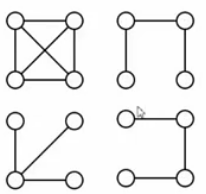
- Adding any edge to the spanning tree will certainly create a cycle
- The sum of edge weights is minimum
A minimum spanning tree is equivalent to graph connectivity.
2. Solving the Minimum Spanning Tree Problem
Greedy algorithms are usually involved:
- "Greedy": Take the best at each step
- "Best": The edge with the smallest weight
- Constraints:
- Can only use edges that exist in the graph
- Must use exactly |V|-1 edges
- No cycles allowed
This has been covered in another blog post. Graph Theory -- Solving the Minimum Spanning Tree Problem (Kruskal's Algorithm & Prim's Algorithm)
喜欢的话,留下你的评论吧~